Part I. Robot 6 axes
1. Work preparation
Easy operation preparate RobotWorks
- RobotWorks easy operation preparation
- Motion mode Normally, there are T: tool execution , part execution, and positioner mode.
- Create the tool before preparation.
- The motion settings are usually set (default values), which almost meets the requirements.
a. Motion mode
RobotWoks has the following three working modes.
First, select the motion mode.
- T: Tool execution (tool moves on the work: example: milling)
- P: Part execution (work moves on the tool: example: grinder polishing)
- S: Positioner mode (robot & positioner collaborative work)
b. Tool settings
RobotWorks, set the tools first (required)
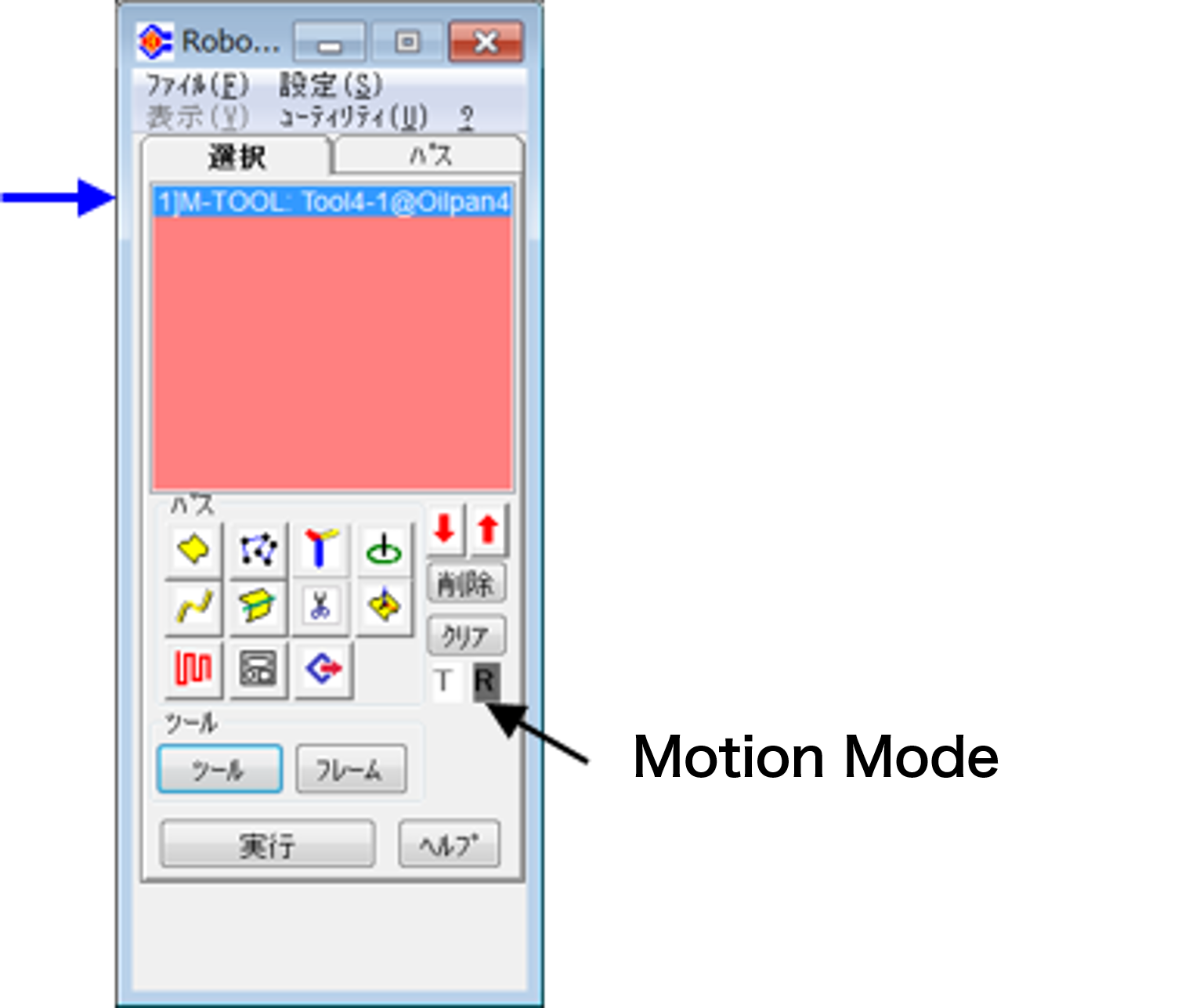
Figure 1-1 Tool settings

Figure 1-2 Tool settings (blue arrow in Figure 1: tool)
c. Motion setting

Figure 2 Motion settings
RobotWorks has some initial values that you should set first.
It is called motion setting as a setting related to operation.
- Automatic pitch: You can define the pitch of the pass point. (See Fig. 3)
- Point reduction, arc: Robot file (data for actual machine) Straight line → 2 points, arc → 3 points
- If there are multiple space (see Fig. 4) paths, a space path (connecting path) is automatically created between the two paths (initial value is 2 points in the middle, height (for obstacle avoidance), 5mm is set).
- Singularity check: The robot posture in which the 4 axes and 5 axes are straight lines is called a singular point (robot movement is impossible), but to check this, turn on the button.
- Point direction: Z-axis fixed (see Fig. 5) When fixing the Z-axis tool rotation and guiding the operation in a specific direction
- Move X, Y, Z, Rx, Ry, Rz: Move (offset) with the value given in the X, Y, Z directions in the tool coordinate system, and move (offset) in each axis rotation direction of the tool coordinate system. I will. Applies to all passpoints. (It can also be offset for individual points in the path)
- Z external: When a tool relative axis 7 axis is added to the tip of 6 axis (see "6. Application example NSK option")
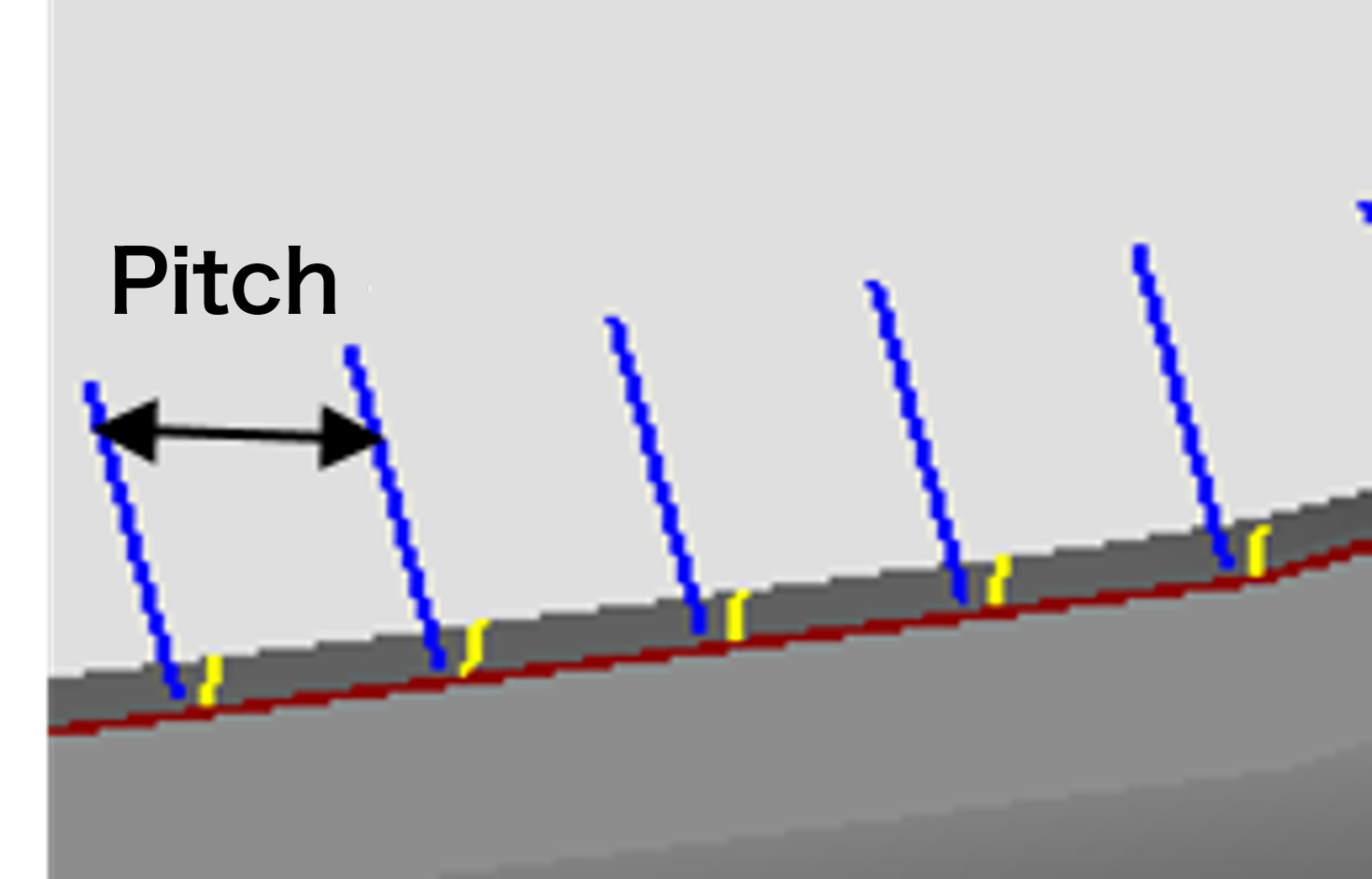
Figure 3 Pass pitch
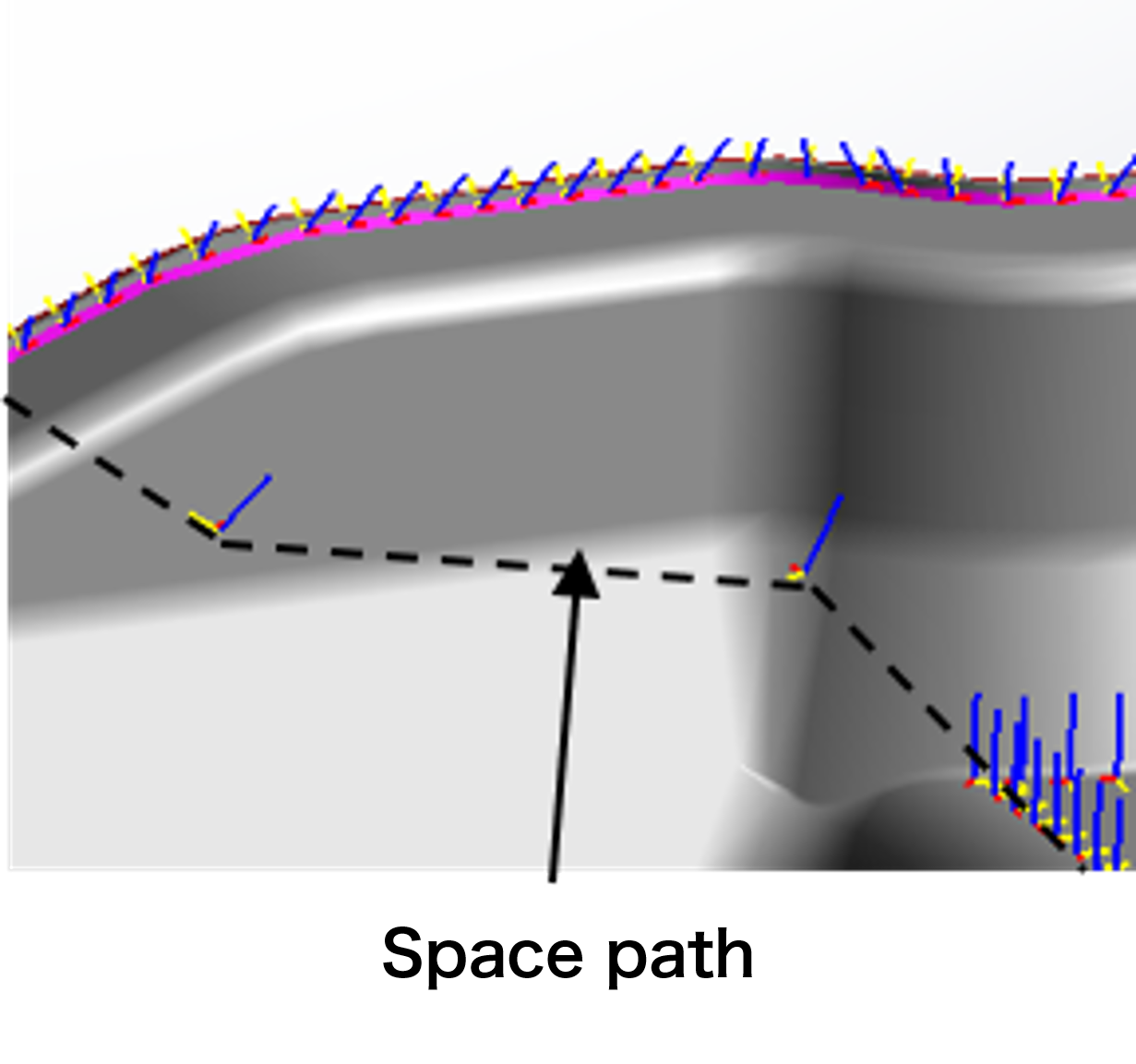
Figure 4 Space path
Figure 5-1 Z-axis fixed
Figure 5-2 Z-axis not fixed
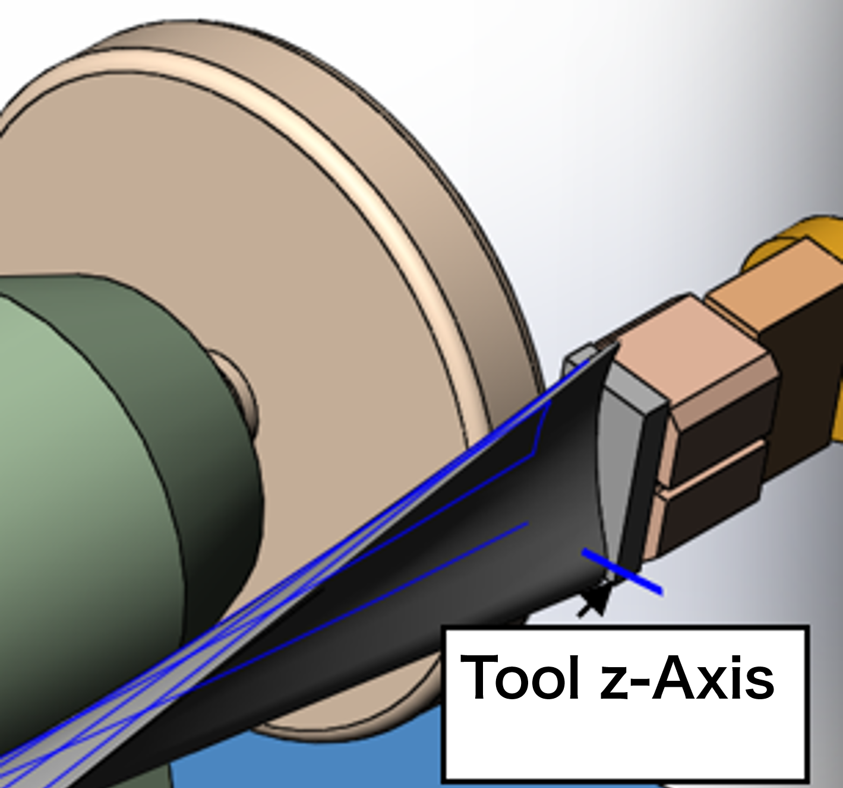
Figure 5-3 Z-axis fixed