5. Robot settings
a. Corresponding robot

Figure 32 Limit check
Currently, the robots that can be supported are the robots of the following robot manufacturers. (Random order, titles omitted)
MOTOMAN、MITSUBISHI、DENSO、FANUC、KAWASAKI、Panasonic、KUKA、ABB、STAUBLI、REISE
b.Checks on robot movement
Interference check(for all solids on the screen)
Arrival check:If the robot goes out of reach, the simulation operation will stop.
Limit check: The soft limit for each axis can be set.
Exceeding that soft limit In Figure-32, yellow is over the limit, green is reachable, and red (not
shown) is reachable.
Singularity check: Checks when the 4th and 5th axes are straight lines.
c.TCP settings

Figure 33 TCP settings
The origin of the TCP setting tool is TCP, but if you want to change it, you can change it using the menu. (Fig.-33)
d.Robot movement
You can easily move the robot using the Move Robot Podem.
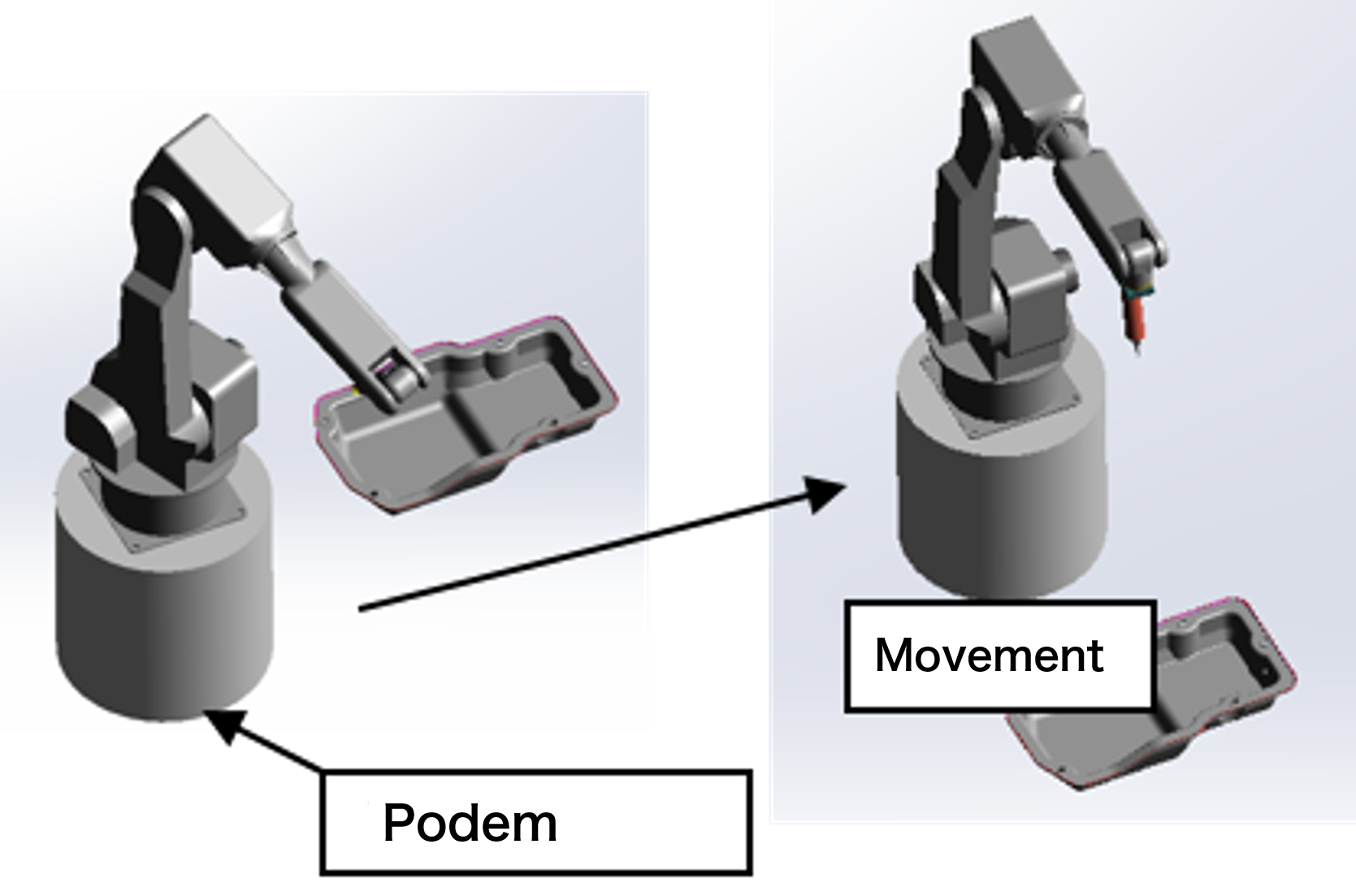
Figure 34 Robot movement by Podem